Evaluation du Canon EOS 5D
pour
les applications astronomiques
1. Objet
Cette page est une évaluation de l'appareil photo numérique Canon EOS 5D du point de vue de l'observation astronomique faible flux. Les performances de cet appareil pour la photographie traditionnelle ne sont quasiment pas abordés, si ce n'est succinctement à la fin de ce document. L'évaluation est factuelle, basée sur un certain nombre de mesures optoélectroniques. L''analyse se voulant comparative avec d'autres boîtiers de la marque (10D, 20D, 350D), voir même avec le Nikon D200 sur certains paramètres, il est possible de se forger malgré tout une opinion, dans la limite des mesures réalisées, sur les mérites ou non du 5D en photo classique (résolution, bruit en longue pose, ...).
L'analyse est réalisée à partir des fichiers RAW uniquement. Ces fichiers sont décodés et traitée avec le logiciel Iris. Ce dernier permet d'étudier les images au niveau du fichier RAW non développé (non "dérawtisé"), c'est à dire sur des pixels en niveaux de gris. On le sait, suivant le rang du pixel dans la matrice du capteur, celui-ci est recouvert d'un filtre rouge, vert ou bleu (matrice dite de Bayer). C'est ce système CFA (pour Color Filter Array) qui permet de restituer l'image en couleurs "naturelles", au travers d'algorithmes d'interpolation plus ou moins sophistiqués.

Image
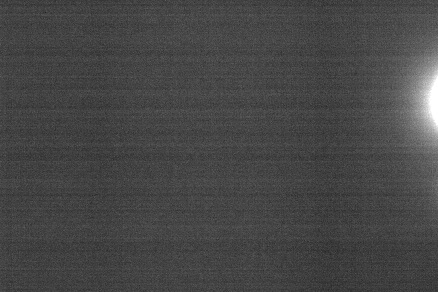
Canon E0S 5D JPEG non retouchée. Objectif Canon 50 mm f/1.4 utilisé à f/7.1.
Temps de pose de 1/1000 à 400 ISO.
|
|
|
Le principe clef de l'analyse des fichiers RAW est de travailler sur les pixels rouge, vert et bleu de manière distincte. Iris peut séparer ces trois familles de pixels en autant d'images noir et blanc. En fait, la séparation en couches colorées produit deux images verte, une image rouge et une image bleu, car la matrice de Bayer élémentaire de 2x2 pixels comporte deux filtres verts pour un seul pixel rouge et une seul pixel bleu. En d'autres termes, il y a dans l'image RAW deux fois plus de pixels vert que de pixel rouge ou de pixel bleu (pour cette raison, les nuances vertes sont toujours les moins bruités dans les images issues de boîtiers numériques, y compris dans les fichiers JPEG).
La commande qui permet de séparer les 4 familles de pixels sous Iris est SLIT_CFA. Par exemple :
>SPLIT_CFA C1 C2 C3 C4
produit les images
|
|
|
|
|
|
Noter qu'il est parfaitement possible de traiter
les 4 couches de manière très précise et indépendamment (au niveau du pixel
de la matrice CFA, avant développement couleur),
puis de reconstruire l'image RAW avec sa matrice de Bayer (MERGE_CFA), pour
enfin réaliser un développement en couleur traditionnel.
2. Caractéristiques géométriques
La table suivante donne les paramètres géométriques du capteur des boîtiers testés :
|
|
Taille du pixel |
Nombre de pixels |
Taille du capteur (mm) |
|
EOS 10D |
7.40 µm |
3072 x 2048 |
22.7 x 15.1 |
|
EOS 20D |
6.42 µm |
3504 x 2336 |
22.5 x 15.0 |
|
EOS 350D |
6.42 µm |
3456 x 2304 |
22.2 x 14.8 |
|
EOS 5D |
8.20 µm |
4368 x 2912 |
35.8 x 23.9 |
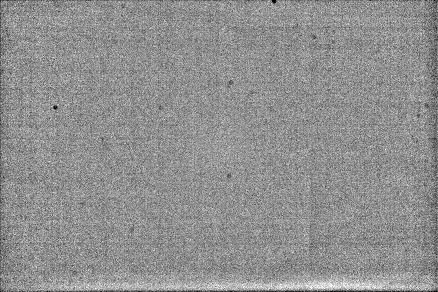
3. Non uniformité de réponse des pixels
Protocole
On
mesure la non uniformité de réponse des pixels (ou en anglais Pixel Response
Non Uniformity - PRNU) en photographiant un écran blanc situé à 1 mètre
de l'appareil. L'objectif est un 400 mm utilisé à l'ouverture de f/5.6 (l'image
est donc très défocalisée). L'éclairement est donnée par une lampe halogène.
La sensibilité est réglée sur 800 ISO et le temps de pose est de 1/4 seconde.
Un traitement spécial est réalisé pour retirer le vignetage naturel de l'optique
et ne conserver que les variations de sensibilités hautes fréquences. Les représentations
à haut contraste ci-après sont des réductions dans le facteur 1/10 des originaux.
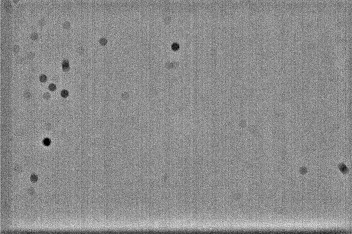
Résultat
PRNU
pixels "Rouge"
PRNU
pixels "Vert"
PRNU
pixel "Bleu"
Commentaire
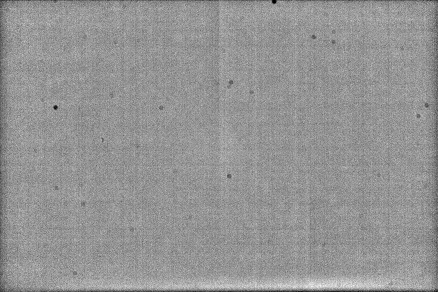
Il
faut tout d'abord faire abstraction de l'ombre des nombreuses poussières
déposées sur le capteur, ce n'est pas le propos ici (ce sont les petites taches
sombres circulaires). Le bruit dans l'image "Bleu" est due au déficit
de lumière dans cette couleur compte tenu du type la lampe utilisée (elle
tire fortement vers le rouge). On
note une zone verticale vers le centre, surtout marquée dans le rouge, caractéristique
de défauts de la tranche de silicium sur laquelle est "gravée" le détecteur (défaut
de poli, défaut chimique, ...). Le PRNU correspond est de 0,35% seulement entre
la partie la plus claire et la partie la plus foncée adjacente. Cette "marque"
sur le capteur est quasi imperceptible sur une image codée en 8 bits standard
(le 3 x 8 bits d'un fichier JPEG), car même en pleine
dynamique, elle ne représente que 0,9 pas de quantification dans l'hypothèse
d'un codage linéaire dans le JPEG. La zone brillante en bas est
une surcroît de sensibilité de l'ordre de 1,4% par rapport au niveau moyen, soit
tout au plus 3 ou 4 pas de quantification sur une image pleine dynamique linéaire
8 bits.
Cela passe à coup sur inaperçu dans les images domestiques prises avec
ce capteur. En astronomie, où l'exigence est plus forte, tous ces défauts sont
aisément corrigeables et de manière quasi parfaite (étalonnage type flat-field). On peut
conclure que le PRNU du capteur testé est extrêmement bas et les défauts
cosmétiques quasi absents. C'est une belle prouesse technique compte tenu de
la surface du détecteur et de la destination "grand-public" du
produit.
A titre de comparaison, on trouve ci-après les cartes de PRNU du EOS 20D et du EOS 5D pour les pixels rouge. Les conditions d'éclairement sont les mêmes, ainsi que les seuils de visualisation et le facteur de réduction géométrique.
|
|
A gauche, le PRNU
du 20D. Pour fixer les idées, la bande sombre à gauche correspond à une baisse
de sensibilité de 0,65% par rapport au niveau moyen. A droite, le PRNU
du 350D.
La performance en PRNU du 5D
est du niveau de celle des exemplaires testées du 20D et du 350D, c'est-à-dire
très bonne. Un point
est à noter concernant la taille des ombres de poussières, bien plus petites
dans le cas du 5D (l'ouverture relative de l'objectif est la même lors du test
des différents boîtiers). Cette taille est inférieure au rapport de dimension des
pixels, ce qui laisse entendre que le filtre de rejection infrouge et anti-aliasing
du 5D, placé juste en avant du détecteur, est significativement moins épais que celui du 20D et du 350D.
4. Réponse relative à un éclairement
Protocole
On photographie un écran
blanc à une distance de 1 mètre en équipant les boîtiers reflex d'un objectif
de 400 mm ouvert à f/5,6. L'image est donc très défocalisée. On mesure dans la
zone centrale de l'image le signal relatif observé pour les pixels rouge, vert
et bleu. Le signal d'offset (signal obtenu sur une pose brève) est soustrait
avant de calculer la réponse. On veille à ce que la luminance de l'écran ne change pas
d'un boîtier à l'autre. La lampe utilisée est un spot halogène. Tous les appareils
sont réglés sur 800 ISO et bien sur, le temps de pose est identique.
Résultat
Le tableau ci-après donne
la valeur du signal relatif observé, le 20D servant de référence :
Table 1
|
|
Pixels "Rouge" |
Pixels "Vert" |
Pixels "Bleu" |
|
EOS 10D |
1.36 |
1.44 |
2.06 |
|
EOS 20D |
1.00 |
1.00 |
1.00 |
|
EOS 350D |
1.10 |
1.11 |
1.14 |
|
EOS 5D |
0.87 |
0.96 |
1.00 |
Commentaire
Pour une même sensibilité
ISO on note que la réponse du 5D est réglée à un niveau
inférieur à celle du 20D, et plus encore à celle du 350D. Ainsi, dans le
rouge, pour une même scène, le RAW d'un 350D produit 20% de signal en plus en
pas codeur qu'un 5D. C'est un résultat surprenant car le surcroît de taille
des pixels du 5D laissait entendre l'inverse. Manifestement les ingénieurs de
Canon n'ont pas poussé le gain global du 5D au niveau du 350D pour miser sur
une plus grande dynamique d'image (le bruit diminue en proportion, voir plus
loin). Ce choix n'arrange pas nécessairement les astronomes. Il faut noter que ce constat ne concerne en principe que les images RAW,
le firmware interne étant susceptible de rétablir l'équilibre ISO dans les images
JPEG.
5. Réponse spectrale
Protocole
La
réponse spectrale est mesurée en utilisant le boîtier reflex comme détecteur
d'un spectrographe LISA équipé d'un réseau de 1200 traits/mm. La dispersion
spectrale est de 2,67 A/pixel pour le 5D et de 2,08 A/pixel pour le 20D / 350D.
Il faut surtout considérer ces courbes dans le sens d'une comparaison des réponses
spectrales relatives et pas comme la vraie réponse spectrale (en effet, le contenu
spectral de la source et la transmission spectrale du spectrographe ne sont pas
calibrés).
Résultat
Le
graphe ci-après permet de comparer la réponse spectrale du 5D et du 20D. Les
courbes sont normalisées vers 6000 A :
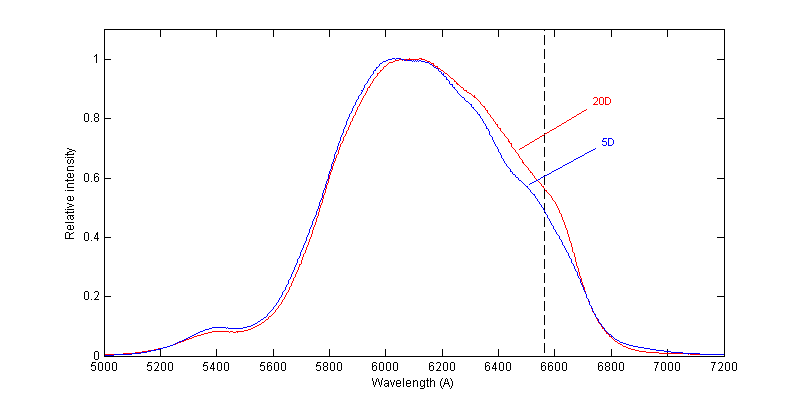
Commentaire
Le
profil spectral relatif est extrêmement comparable pour le 5D et le 20D, mais
on note tout de même un léger déficit pour le 5D au niveau de la raie Halpha,
une région du spectre pourtant déjà bien mal servie par les appareils photos
actuels (à l'exception du Canon EOS 20Da qui corrige en partie le problème de sensibilité
dans le rouge, mais qui a eut une diffusion confidentielle). On aurait pu rêver d'une situation
inverse pour le 5D, mais ce n'est pas le cas ! Le démontage du filtre demeure
la solution pour étendre la sensibilité vers le rouge, mais au prix du EOS 5D,
l'opération est probablement à réserver à un EOD 350D de seconde main.
6. Mesure du gain
Protocole
On
mesurer le gain G en électrons par ADU (ADU = Analog to Digital Unit, ou pas
codeurs). Pour cela on relève le signal S en ADU dans une zone d'une
plage uniforme, ainsi que le bruit  (écart type) dans cette même zone. L'évaluation est faite sur les pixels
de l'un des plans couleurs. Le bruit de signal proprement dit est calculé en
faisant :
(écart type) dans cette même zone. L'évaluation est faite sur les pixels
de l'un des plans couleurs. Le bruit de signal proprement dit est calculé en
faisant :

avec  le bruit mesuré dans la même zone sur une pose faite dans l'obscurité et
avec le même temps de pose.
le bruit mesuré dans la même zone sur une pose faite dans l'obscurité et
avec le même temps de pose.
Le gain en ADU par électron est donné par :

avec O, le signal mesurée sur une pose faite dans l'obscurité totale.
On calcule aussi g, l'inverse du gain :

plus classique, qui s'exprime donc en électrons par pas codeur (e-/ADU).
Résultat
La
table ci-après donne le gain G et l'inverse du gain g pour une
sensibilité affichée de 400 ISO et une température ambiante de 23°C :
Table 2
|
|
G (ADU / e-) |
g (e- / ADU) |
|
EOS 10D |
0.43 |
2.34 |
|
EOS 20D |
0.32 |
3.09 |
|
EOS 350D |
0.39 |
2.56 |
|
EOS 5D |
0.24 |
4.08 |
Commentaire
Le
5D apparaît être le reflex numérique ayant le gain le plus faible de tout
les modèles testés. Le rapport entre le gain du 20D et le gain du 5D est
égal à 0,32 / 0,24 = 1,33. Nous avons vu par ailleurs que la réponse du 5D est
égale à 0,96 fois la réponse du 20D dans le vert. Le rendement d'un pixel du
5D est donc 1,33 x 0,96 = 1,28 fois supérieur à celui du 20D dans le vert. Compte
tenu du rapport de surface des pixels du 5D et du 20D on pouvait s'attendre
à une réponse du pixel d'un facteur 1,63 en faveur du 5D.
Le compte n'y ai pas, probablement en raison d'un problème de facteur de
remplissage du pixel (i.e. toute la surface du pixel n'est pas photosensible
et donc, l'évolution de la réponse n'est pas proportionnelle à la
surface du pixel, mais inférieure). Le gain en réponse pixel est relativement
modeste, mais semble-t-il significatif. Il explique pourquoi les ingénieurs de Canon
ont abaissé le gain électronique du 5D pour compenser se surplus de sensibilité
et équilibrer la réponse ISO par rapport à la norme.
Pour trouver le gain électronique à une autre sensibilité que 400 ISO, il suffit de multiplier le gain G du tableau 2 par le rapport des sensibilité ISO. Par exemple, puisque le gain du EOS 5D est de 0,24 ADU/e- à 400 ISO, ce gain est de 2 x 0,24 = 0,48 ADU/e- à 800 ISO.
7. Bruit de lecture
Protocole
On
réalise deux poses très brèves dans l'obscurité totale (1/1000 s, afin de rendre le courant d'obscurité
négligeable). On calcule la différence des deux images
et on évalue l'écart type de cette différence dans une zone de 300 pixels
de coté approximativement. Le bruit de lecture du détecteur en pas codeur (ou
ADU) est alors l'écart type trouvé, divisé par la racine de deux (1,414), car
l'opération fait intervenir deux images qui ajoutent leur bruit quadratiquement. La
mesure est réalisée à la température ambiante de 23°C et juste après la mise
en route de l'appareil photo pour éviter la chauffe des circuits électroniques.
Résultat
La
table 3 donne le bruit en pas codeur pour différentes sensibilités
en ISO, et pour le 10D, le 20D, le 350D et le 5D
Table 3
|
|
50 ISO |
100 ISO |
200 ISO |
400 ISO |
800 ISO |
1600 ISO |
3200 ISO |
|
EOS 10D |
- |
1.83 ADU |
2.74 ADU |
5.01 ADU |
9.00 ADU |
17.2 ADU |
- |
|
EOS 20D |
- |
2.04 ADU |
2.18 ADU |
2.43 ADU |
3.18 ADU |
4.49 ADU |
- |
|
EOS 350D |
- |
2.12 ADU |
2.25 ADU |
2.82 ADU |
3.80 ADU |
6.12 ADU |
- |
|
EOS 5D |
1.83 ADU |
1.85 ADU |
1.90 ADU |
2.06 ADU |
2.60 ADU |
3.74 ADU |
7.43 ADU |
On remarque que l'évolution du bruit n'est pas linéaire avec la valeur de la sensibilité ISO car il existe un bruit talon, c'est à dire indépendant de la valeur ISO. Le bruit observé (bruit "caméra") est en fait la somme quadratique de deux bruits distincts : le bruit de lecture proprement dit du détecteur, de l'ordre de 3,7 électrons pour le EOS 5D, et le bruit talon, de l'ordre de 1,7 ADU, qui provient des circuits électroniques suivant l'étage amplificateur (c'est pour cela que le bruit talon est indépendant de la sensibilité ISO). Le bruit observé en pas codeur pour une pose brève peut ainsi se mettre sous la forme
avec  le bruit de lecture du capteur en électron, G le gain en ADU / e- et
le bruit de lecture du capteur en électron, G le gain en ADU / e- et  le bruit talon (ou fixe) électronique en ADU.
le bruit talon (ou fixe) électronique en ADU.
La valeur des paramètres  et
et  est évaluée par ajustement des points de mesure en utilisant l'équation ci-dessus.
est évaluée par ajustement des points de mesure en utilisant l'équation ci-dessus.
Par exemple pour le EOS 5D, on trouve :

ce qui signifie que le bruit talon est de 1,73 pas codeur et que le bruit de lecture du capteur CMOS est de 3,74 électrons.
La table ci-après résume l'ensemble des paramètres de bruit des boîtiers reflex testés :
Table 4
|
|
Bruit de lecture (en e-) |
Bruit talon (en ADU) |
|
EOS 10D |
9.93 |
2.19 |
|
EOS 20D |
3.69 |
2.09 |
|
EOS 350D |
3.65 |
2.28 |
|
EOS 5D |
3.74 |
1.73 |
Commentaire
Les
EOS 20D, 350D et 5D ont des caractéristiques de bruit très semblables. Rien
de déterminant sépare ces caméras, les écarts sont proches de la marge d'erreur
des mesures. Seul le bruit fixe du 5D testé semble en très léger progrès. On
peut relever que le bruit de lecture ramené en électron est d'un niveau remarquablement
bas pour un détecteur photonique. Un bruit de lecture aussi faible que 3,7 électrons ne se rencontre que
très exceptionnellement dans les caméras CCD. Une telle performance
avec les capteurs CMOS de Canon est à mettre au crédit des circuits à interne
à haut gain qui caractérise cette technologie. La technique du double échantillonnage
corrélé au niveau de chaque pixel, qui caractérise les capteurs CMOS Canon,
est aussi d'une redoutable efficacité. Le Canon 10D marque son
age, avec un bruit de lecture trois fois supérieur à celui rencontré dans les
boîtiers les plus récents
de la marque.
L'écart de le bruit caméra constaté entre les modèles 20D, 350D et 5D est pratiquement uniquement lié à la différence de gain G qui existe entre elles (voir la table 2). Il suffit de modifier le gain ISO pour rétablir la quasi similitude de performance en terme de bruit. Le meilleur régime de fonctionnement des caméras est celui d'un gain G affiché tel que le bruit fixe devient juste négligeable en regard du bruit de lecture. Si le gain dépasse trop cette valeur, la dynamique vraie est détériorée (dynamique vraie = rapport entre le signal maximal enregistrable et le bruit caméra). On considère que le bruit fixe devient négligeable pour la valeur de G telle que :

soit

De la valeur de G, on déduit à partir de la table 2, la sensibilité ISO optimale d'utilisation de l'appareil photo. La table suivante donne ce résultat.
Table 5
|
|
Gain optimal (ADU/e-) |
ISO optimal |
ISO affichable recommandé |
|
EOS 10D |
0.31 |
290 |
400 |
|
EOS 20D |
0.80 |
1000 |
1000 |
|
EOS 350D |
0.88 |
900 |
800 |
|
EOS 5D |
0.65 |
1100 |
1000 |
9. Rapport signal sur bruit
Protocole
Pour
évaluer le rapport signal sur bruit, on photographie avec un téléobjectif un
écran blanc éclairé le plus uniformément possible. L'image est fortement défocalisée
pour éviter d'avoir la texture de l'écran dans l'image. On travaille aussi à
pleine ouverture pour limiter l'impact d'éventuelles poussières dans la précision
de l'évaluation. Le temps de pose est bref pour rendre négligeable le bruit
thermique - voir le paragraphe 11 (de l'ordre de 1/100 de seconde ou plus
bref). On réalise deux images RAW successives, I1 et I2. On soustrait le signal
d'offset (voir le paragraphe 10) et on extrait l'une des couches verte avec
l'outil SPLIT_CFA.
On évalue le signal en pas codeur vers le centre de l'image, c'est la valeur
S.
On calcule ensuite la différence I1 - I2, puis, dans le résultat, on calcule
l'écart-type de la fluctuation vers le centre de l'image dans une zone
de quelques centaines de pixels de coté (avec les outils statistiques de Iris
par exemple). Le bruit s dans
une image est alors l'écart-type mesuré, divisé par la racine de deux (1,414
environ). La division par la racine de deux est nécessaire car le bruit est
compté deux fois du fait de la différence I1-I2. Cette opération de différence est importante car elle garantie que des défauts de réponse interpixel ne seront pas
pris pour du bruit (par exemple, si l'ombre d'une poussière est présente dans
l'image, après la différence I1-I2, la poussière n'a plus d'impact sur le calcul
du bruit puisqu'elle n'est plus visible). Le rapport signal sur bruit observé
est alors S/s.
Par exemple, à partir du dispositif expérimental ci-dessus, avec le 5D nous avons enregistré un signal de 308 pas codeur à 400 ISO et un bruit RMS de 8,9 pas codeur, d'où un rapport signal sur bruit (S/B) pour cet éclairement de 34,4.
La même expérience menée avec un 20D donne un signal de 314 ADU et un bruit de 10,2 ADU, soit un rapport signal sur bruit de 30,8.
On peut conclure que pour le même signal enregistré (et en gros les mêmes conditions d'éclairement), le 5D délivre une image ayant un rapport signal sur bruit environ 13% supérieur à celui du 20D. C'est l'accroissement de la taille des pixels qui est probablement à l'origine de cette progression pour le 5D.
Les informations des tables 2 et 4 permettent de calculer le rapport signal sur bruit de manière analytique. La comparaison avec les valeurs trouvées expérimentalement permet de vérifier la robustesse du modèle de bruit que nous avons établi. Le S/B est donné par la formule :
avec
S : le signal en pas codeur (ADU)
g
: l'inverse du gain en électrons/ADU (voir table 2) : le bruit de lecture en électrons (voir
la table 4)
: le bruit de lecture en électrons (voir
la table 4) : le bruit talon en pas codeur (voir
la table 4)
: le bruit talon en pas codeur (voir
la table 4)
Prenons un exemple. Supposons que l'on observe un signal de 308 ADU dans l'un des canaux colorés de l'image RAW (soit le rouge, soit le vert, soit le bleu, peu importe). Pour information, un tel niveau dans un fichier JPEG représente environ une intensité de 128 (sur un codage en 8 bits), soit la mi-dynamique d'image. L'appareil est un 5D et il est réglé sur la sensibilité de 400 ISO. En résumant les informations des tables 2 et 4 nous avons :
S = 308 ADU
g = 4.08 e-/ADU = 3.74
= 3.74 = 1.73
= 1.73
et

Cette valeur trouvée par calcul est à rapprochée de celle trouvée expérimentalement pour le même signal S, soit un S/B de 34,4. L'accord est tout à fait satisfaisant entre le calcul et l'observation.
Vous pouvez vérifier sans peine que dans les conditions d'éclairement considérées, le bruit de lecture et le bruit talon ont un impact quasi nul sur le rapport signal sur bruit final. On dit que le rapport signal sur bruit est limité par le bruit de signal, ce qui est la garantie d'avoir la meilleure image possible. C'est à mettre au crédit du faible bruit intrinsèque des boîtiers évalués.
Faisons le même calcul avec un 20D, toujours utilisé avec le gain de 400 ISO, alors que le signal enregistré est de 314 ADU (soit quasi identique au cas traité avec le 5D). Dans cette situation on a
S = 314 ADU
g = 3.06 e-/ADU = 3.69
= 3.69 = 2.09
= 2.09
et

Ici encore l'accord est très bon avec le S/B observé (30,8).
Résultat
La
table ci-après donne le rapport signal sur bruit trouvé dans une image
RAW exposée de telle manière que le signal dans l'image JPEG associée soit environ
à la mi-dynamique des 256 niveaux disponibles. On fait la comparaison entre
le S/B trouvé expérimentalement et le rapport signal sur bruit évalué par
calcul avec le modèle de bruit (les différences sont infimes).
Table 6.
|
|
Signal (ADU) |
Bruit observé (ADU) |
S/B observé |
S/B calculé |
|
10D |
300 |
- |
- |
24,4 |
|
20D |
314 |
10,1 |
30,8 |
30,2 |
|
350D |
296 |
11,2 |
26,4 |
26,7 |
|
5D |
308 |
8,9 |
34,4 |
34,6 |
Commentaire
Au
final, sur un à-plat, le 5D a une performance en rapport signal sur bruit 22%
supérieure à celle d'un 350D. Le 5D a aussi une performance en rapport signal
sur bruit de 12% supérieure à un 20D. Ce résultat s'entend à iso-densité
d'image (même signal enregistré, ce qui peu supposer un léger ajustement du
temps de pose entre les boîtiers). La grosse taille des pixels du 5D permet
à cet appareil de délivrer des images moins bruitées, plus propres d'aspect, que
les modèles 350D et 20D (qui donnent déjà des images excellentes !). Nous
quantifions ici cette différence au travers d'un protocole et d'un modèle numérique.
Elle se vérifie de manière plus subjective, mais évidente, sur de simples images
de la vie courante. L'accroissement de performance du 5D n'est cependant pas
en proportion avec l'augmentation de la taille des pixels, comme nous l'avons
déjà souligné, ce qui est un peu dommage. Ainsi, en ajoutant un critère de qualité
faisant intervenir la résolution des images, l'écart entre le 20D et le 5D est
moins net ; mais tout dépend du type d'applications auquel on destine le boîtier.
Les "gros" pixels apportent cependant un plus visible, en particulier
en photographie traditionnelle, tel que le traduit en chiffres la table 6. Ce
sera l'essentiel pour beaucoup de photographes.
La différence en rapport signal sur bruit entre le 350D et le 20D n'est pas a mettre sur le compte de la taille des pixels, puisque cette dernière est identique dans les deux cas. Il existe un écart technologique subtile entre le capteur du 350D et du 20D. Il ne peut être que lié qu'à un accroissement du rendement quantique sur le 20D par rapport au 350D (voir le paragraphe 12). On peut en revanche parier que les rendements quantiques du capteur du 20D et du 5D sont identiques, et que le gain observé pour ce dernier est uniquement lié au facteur géométrique d'accroissement de la taille des pixels.
10. Signal d'offset et dynamique de codage
Protocole
On
calcule l'image médiane de 10 clichés réalisés dans l'obscurité totale
en 1/1000 de seconde à 400 ISO. Le résultat est appelé la carte du signal d'offset
(ou carte du bias).
Résultat
|
|
|
Les structures verticales ont une intensité inférieure à 1 pas de quantification (de l'ordre de 0,3 ADU). Elles sont visibles ici car les images sont issues d'un binning (regroupement) de 10 x 10 pixels, ce qui confère un très fort signal sur bruit au résultat, permettant de mettre en évidence des détails d'amplitude inférieure au pas de quantification dans les originaux. L'offset est donc très uniforme.
Le niveau médian du signal d'offset est réglé par le logiciel interne à la valeur de 128 ADU pour le 5D, le 10D et le 20D (pour le 10D, le niveau moyen de l'offset passe à 256 si on règle la sensibilité à 1600 ISO). Le niveau médian de l'offset du 350D est réglé à 256 par le firmware. De toute évidence, le logiciel interne se sert du niveau observé sur des pixels périphériques masqués de la lumière pour ajuster le niveau d'offset à une valeur qui est exactement une puissance de deux. On peut louer ici très fortement l'initiative des ingénieurs Canon d'avoir calé le niveau d'offset sur une valeur qui n'est pas le niveau 0 (contrairement à ce qui se passe sur les Nikon D70 et D200 par exemple). Cela permet d'avoir une statistique de bruit non biaisée par un écretage si la moyenne est centrée à zéro (perte des valeurs négatives dans le signal), une caractéristique déterminante pour la détection faible flux.
On note tout de même un petit effet pervers de la méthode de calage de l'offset dans la gamme Canon. Si la pose est longue et la température ambiante élevée, les pixels périphériques servant de référence de noir sont affectés d'un signal thermique qui peut être significatif. Le niveau d'offset est alors sur-corrigé et il peut alors arriver qu'il atteigne le niveau zéro. Ce cas de figure est apparu sur une pose de 5 minutes dans l'obscurité avec une température ambiante de 25°C, une sensibilité de 800 ISO et après un fonctionnement permanent du boîtier d'une durée d'une heure (voir paragraphe suivant). C'est tout de même une situation extrême, quasiment jamais rencontrée en astronomie, mais il faut être prévenu, le niveau moyen apparent de l'offset peut évoluer en fonction de la température du capteur (ceci est vrai pour tous les modèles testés). On comprend dès lors que Canon ai pris une certaine marge pour le calage de l'offset (de 128 à 256 suivant les modèles), ce qui est une démarche intelligente même si elle affecte très légèrement la dynamique d'image.
On défini la dynamique de codage comme étant l'écart en pas codeur entre le plus fort niveau enregistrable et le plus faible niveau enregistrable. A ce stade, sur le modèle de 5D testé, il y a une mauvaise surprise : le signal maximal est limité à 3744 ADU. Ce niveau maximum est le même pour les pixels rouge, vert et bleu. Il ne s'agit pas d'un écrétage analogique (saturation d'un amplificateur) mais d'un écrétage numérique, tout à fait volontaire de la part des ingénieurs Canon. On soupçonne que les dits ingénieurs ont eu quelques difficultés de gestions des fortes valeurs de signal avec le capteur CMOS du 5D ou que des marges ont été prises pour gérer la balance des couleurs. Cette stratégie n'est probablement étrangère au gain G relativement bas du 5D qui met à rude épreuve le capteur pour les forts éclairement. Dans le cas du 350D, du 20D et du 10D, le niveau maximal numérique est bien calé à 4095, c'est à dire que la capacité du convertisseur analogique numérique 12 bits est totalement exploitée.
En fin de compte, puisque avec le 5D le niveau du signal d'offset est ajusté sur 128 ADU, la dynamique de codage de ce boîtier est de 3744 - 128 = 3616 ADU. Le codage effectif des RAW est donc réalisé sur un équivalent de 11,82 bits et non pas 12 bits. En pratique, cet écart est assez peu significatif, mais il faut souligner que le 5D régresse sur ce paramètre par rapport aux modèles plus ancien et moins coûteux.
Commentaire
Le
signal d'offset est très uniforme et propre. Aucune trace de bruit parasite
plus ou moins périodique est visible. C'est un très bon point pour l'observation
astronomique. En revanche, la dynamique de codage du RAW est légèrement réduite par rapports
aux modèles précédents, ce qui laisse un gout un peu amer.
11. Signal thermique
Protocole
On
réalise des poses longues en obscurité à une température ambiante connue. La
carte du signal thermique est extraite en faisant la médiane de 10 images de
ce type à laquelle on a retirer la médiane de 10 images du signal d'offset.
La carte du signal thermique est alors une image centrée approximativement sur
zéro.
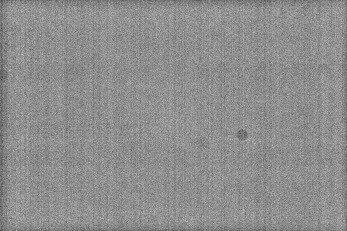
Résultat
Les
images suivantes montrent la carte thermique du EOS 20 et du EOS 5D à la même
échelle (réduction d'un facteur 10 par rapport aux originaux). Les seuils de
visualisation sont identiques et réglés pour avoir un très haut contraste (7,
-3). La température ambiante était de +2°C lors de ces prises de vue. Le temps
de pose des images individuelles est de 150 secondes à 400 ISO.
|
|
|
Le niveau du signal thermique est tout à fait proche entre les deux boîtier testé. Les stries horizontales représente un niveau de signal de l'ordre de 1 pas de quantification (1 ADU), donc très faible.. L'électroluminescence de l'amplificateur de sortie est plus marquée dans le 5D : elle atteint un amplitude maximum de 13 pas de quantification pour une pose de 150 s @ 400 ISO, ce qui demeure modeste. L'intensité maximum de l'électroluminescence est de 3 ADU dans le cas du 20D pour des conditions d'acquisition identiques.
La figure suivante montre l'histogramme de tous les pixels de l'image pour une pose de 300 secondes à la sensibilité de 800 ISO. La température ambiante est de 25°C. Des poses de 5 minutes sont enchaînées sans temps morts et sans arrêter l'appareil. Cela permet de mesurer l'impact de l'élévation de température des composants électronique sur le signal d'obscurité. L'appareil à été mis juste sous tension pour la premiere pose à T0. Au moment de la dernière pose, il s'est écoulé une heure (T0 + 1 heure)
.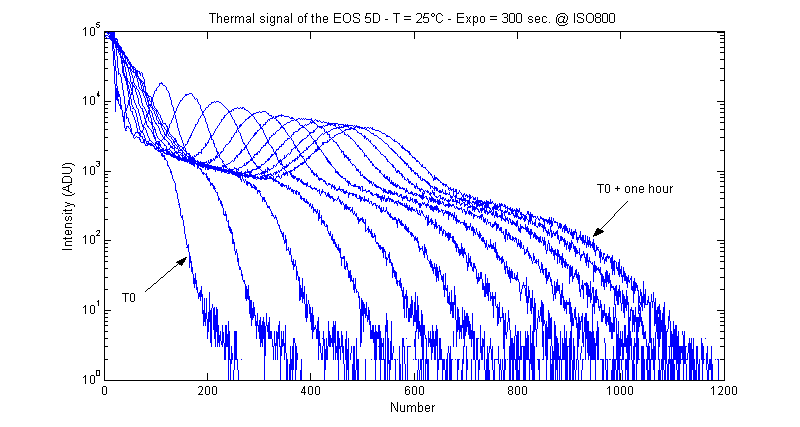
On remarque la présence de plusieurs populations de points chauds (bosses dans l'histogramme). L'effet de la puissance électronique consommée est important : le courant d'obscurité augmente d'un facteur 5 entre la première exposition et la dernière exposition, au bout d'une heure de fonctionnement permanent. L'équilibre thermique n'est pas atteint après une heure de mise sous tension. Le signal thermique demeure malgré tout remarquablement bas : seuls 1000 pixels dépassent le niveau de 100 pas codeurs en 5 minutes de pose à 800ISO, après une mise en route de heure, sur un composant qui comporte près de 13 millions de pixels !
Le graphe ci-dessous permet de comparer le signal thermique du 5D et du 20D à basse température ambiante (0°C) :
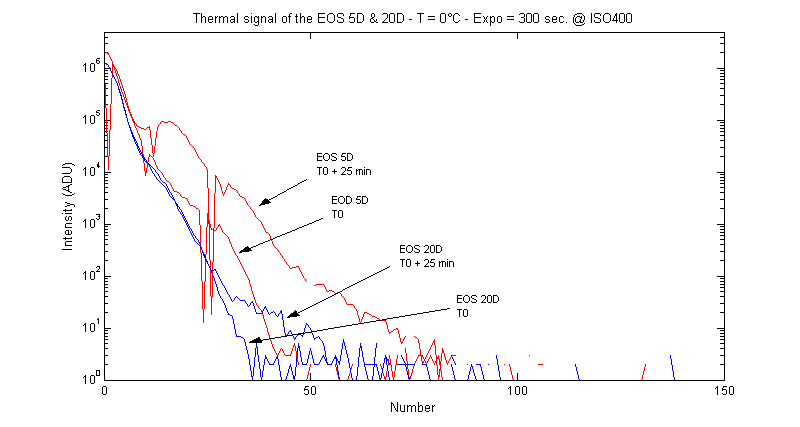
Le signal thermique est plus bas avec le 20D, probablement la conséquence d'une taille de pixel plus petite que dans le 5D (les "gros" pixels du 5D collectent plus de charges thermiques). Le 5D s'échauffe plus vite que le 20D et cela a un effet direct sur le niveau du signal thermique (ici un test sur 25 minutes de mise sous tension). Ce fait est immédiatement perceptible par un simple touché de l'appareil : le chassis du 5D est manifestement plus chaud que celui du 20D après une même durée de fonctionnement. On peut estimer que la température du capteur CMOS du 5D s'élève de 8 bons degrés après une heure de fonctionnement continu, probablement à cause de la dissipation des circuits électroniques adjacents. Heureusement que la technologie du capteur Canon affiche une niveau du signal thermique intrinsèque extraordinairement bas.
|
|
Commentaire
Le
signal d'obscurité du 5D demeure très bas, dans la lignée des modèles récents
de la marque Canon. Ce résultat est important pour un imageur faible flux. On
note cependant un taux de charge thermique pour le 5D légèrement plus
élevée que celui mesuré sur le 20D, s'en doute à cause de la différence de taille
des pixels. On met aussi en évidence une élévation de température en fonctionnement
assez significative avec le 5D, supérieure à celle rencontrée sur le 20D et
le 350D. C'est s'en doute le défaut le plus important relevé sur le 5D. Il n'est
pas dramatique, mais il implique une forte vigilance lors du
retrait du signal thermique en prétraitement (optimisation fine de la carte
d'obscurité soustraite quasiment pour chaque image brute à traiter).
A propos du Nikon D200
Le Nikon D70 présentait un handicap majeur pour l'observation astronomique faible flux : le firmware du reflex Nikon réalise sur le RAW un filtrage (s'approchant d'une médiane) dès lors que le temps de pose dépasse une seconde. Une astuce permet de bloquer le filtrage, mais elle est très peut pratique et à la longue, irréaliste en usage de routine ("mode 3"). Cliquer ici pour des détails. Le problème est très critique car le filtre agit aussi sur les objets ponctuel de l'image. L'algorithme de filtrage gomme par exemple les faibles étoiles. Il est intéressent de savoir si le Nikon D200, un boîtier plus avancé que le D70, corrige ce défaut
L'analyse présentée ici est très préliminaire, le temps passé à tester le D200 ayant été très bref.
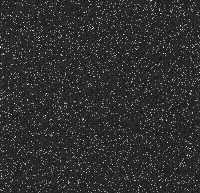
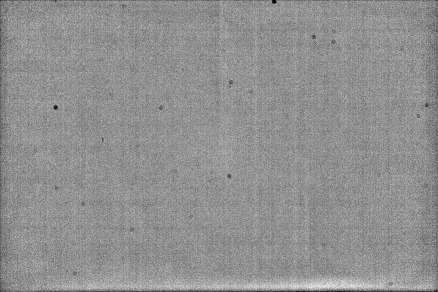
Le signal de fond comparatif du 5D et du D200 est présenté dans les "crops" d'images ci-après. Il s'agit de portions du fichier RAW. Le temps de pose est de 1/80s à 1600 ISO pour une température ambiante de 26°C pour le 5D et de 23°C pour le D200. Les images sont acquises dans l'obscurité. Tous les modes de réduction de bruit sont mis à zéro (c'est la règle fondamentale pour l'observation astronomique faible flux et pour obtenir des images détaillées).
|
|
Le signal thermique est bien plus élevée dans le Nikon D200 par rapport au Canon 5D. Il est impossible avec les mesures disponibles de déterminer dans quelle proportion, mais l'écart est manifestement important. Cela n'est pas très surprenant, le D200 reprenant la technologie du détecteur que le D70 (capteur CCD Sony). Le courant d'obscurité observé dans les images du D200 est typique de ce que l'on est en droit d'attendre d'un capteur CCD non refroidi.
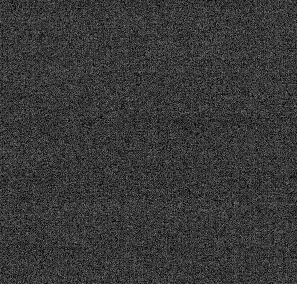
Les portions d'images ci-après montrent le même comparatif, mais pour une faible sensibilité ISO. Le temps de pose est toujours de 1/80 s, mais à 100 ISO.
|
|
On mesure ici le bruit de lecture du reflex. Ce bruit semble légèrement plus important dans l'image du 5D, mais il y a un piège. En effet, les ingénieurs de Nikon ont décalé le signal d'offset du D200 pour lui donner une moyenne nulle (c'est la même situation que pour le D70). Il y a donc une perte d'information puisque les valeurs négatives du signal par rapport à la moyenne sont annulées. C'est tout de même une petite hérésie, mais on peut admettre que ce n'est pas ici le soucis premier du photographe traditionnel ! On peut simplement dire que le niveau du bruit de lecture est assez équivalent dans le 5D et dans le 200.
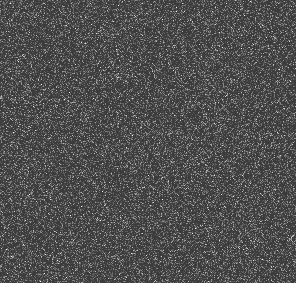
Le test le plus critique est celui qui consiste à réaliser une pose longue dans l'obscurité et à examiner l'allure du signal thermique. L'image ci-après montre le résultat dans le cas du D200 :
Pose
de 30 secondes dans l'obscurité à 800 ISO. Tous les modes de réduction de bruit
sont mis sur OFF.
Le niveau de signal d'obscurité dans cette image est anormalement bas compte tenu de la durée de la pose. Les pixels les plus intenses ont un niveau de 40 ADU seulement. De toute évidence, Nikon filtre le bruit, mêmes lorsque les fonctions de réduction ne sont pas activée. On retrouve la même texture de filtrage que sur le D70, l'algorithme de calcul est le même. Nikon impose ce filtrage et produit un RAW qui n'en est pas un au sens littéral du terme. Cette initiative peut se comprendre à l'attention du photographe normal qui ne souhaite certes pas avoir dans ces images faible flux un grain extrême. Mais il ne faut pas se faire d'illusions, même en photographie traditionnelle, ce filtre retire des détails utiles de l'image. Le capteur du D200 n'est pas en progrès par rapport au D70, et la technologie CCD "traditionnelle" de Sony marque le pas par rapport aux capteurs CMOS de Canon. Attention, cette appréciation ne concerne qu'un seul paramètre, le niveau du signal d'obscurité. Mais celui-ci est fondamental pour l'observation astronomique faible flux. Sous réserve de tests plus poussés ou de la découverte de modes cachés permettant ne pas filtrer le bruit en pose longue, le D200 apparaît difficilement utilisable pour des applications astronomiques sérieuses.
12. Rendement quantique
Protocole
La
mesure du rendement quantique du Canon 5D est évaluée à la longue d'onde de
588 nm, dans la partie jaune du spectre (le rendement quantique est le rapport
entre le nombre de photocharges produites dans un pixel et le nombre de photons
de lumière incident dans ce pixel). La mesure est complexe et entachée
d'une erreur assez importante. Elle fait appel à l'analyse spectrale sur des
étoiles observées à la fois avec une caméra CCD refroidie équipée d'un détecteur
Kodak KAF-0402ME et avec le boîtier Canon 5D. Pour des détails sur cette observation,
cliquer ici. On mesure le rapport d'intensité dans les spectres, et connaissant
le rendement quantique du CCD Kodak, on en déduit le rendement du capteur CMOS
équipant le 5D. A titre d'exemple on trouve ci-après une portion du spectre
de l'étoile Alpha Orion observée avec une caméra Audine équipée du KAF-0402ME
et le spectre du même objet en couleur observé avec le Canon 5D.


En haut le spectre obtenu avec le CCD KAF-0402ME et en bas le spectre obtenu avec le capteur CMOS du boitier
Canon 5D.
La région spectrale visée se situe au niveau du doublet du sodium,
visible au centre.
Résultat
La
situation est compliquée par la structure en damier colorés du CMOS Canon (matrice
de Bayer). On
calcule un rendement quantique distincts pour chaque famille de pixel après dématricage.
Ce rendement est donc celui d'un pixel "virtuel" de 8,2 microns de
coté, obtenu par interpolation de pixels adjacents. Après avoir ramené les
spectres au même temps de pose et au même échantillonnage spectral, on trouve
le résultat suivant à 588 nm
Pixels rouge
(signal CMOS canon) / (signal
CCD Kodak) = 0,11
Pixels vert
(signal CMOS canon) / (signal CCD Kodak)
= 0,07
Pixels bleu
Non mesurable compte tenu du faible
signal dans la zone du spectre observé.
Puisque le rendement quantique du KAF-0402ME est d'environ 72% à 588 nm, on déduit que le rendement quantique du CMOS Canon (avec le fiitre anti-IR en place) est :
Pixels rouge à 588 nm : rendement de 8%
Pixels vert
à 588 nm : rendement de 5%
Commentaire
Le
rendement quantique du capteur Canon est notoirement inférieur à celui d'un
CCD sensible tel que le KAF-0402ME. Ce dernier a un facteur de remplissage
du pixel proche de 100% et aucun filtre coloré ne vient s'interposer devant
le capteur. En outre, dans le CMOS Canon, 1/4 des pixels seulement produisent
l'image verte et la moitié des pixels seulement sont utilisés pour produire
l'image verte. C'est bien la présence de la structure en matrice de Bayer qui
pénalise le capteur CMOS. On rève d'un CMOS noir et blanc, sans aucun filtre
devant chaque pixel !
Le rendement quantique d'un canon 5D non modifié (sans retrait du filtre de rejection infrarouge) au niveau de la raie Halpha doit être tout au plus de 3 ou 4 pourcent.
13. Images sur le ciel
Protocole
C'est
bien sur l'épreuve de vérité. On photographie l'amas des Pléiades (M45) en utilisant
comme objectif le Canon 400 mm f/5.6L, à l'ouverture maximale. Cette optique est choisie car elle donne
un très bon piqué. C'est quasiment la taille pixels du boîtiers qui limite la résolution
spatiale. On composite 3 poses
de 180 secondes chacune. Les boîtiers sont réglés à la même sensibilité de
400 ISO. Les images sont acquises en milieu urbain avec une très sévère pollution
lumineuse. Ce point, plus le fait que le temps de pose est court, fait que le
but n'est pas ici de faire de belles photos, mais d'apprécier la restitution
du champ image en fonction du boîtier.
Résultat
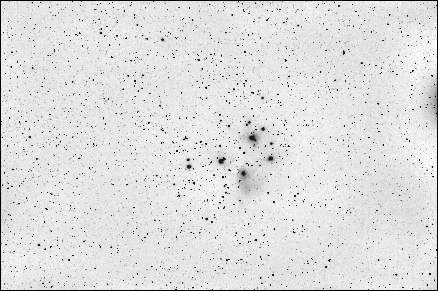
La
planche ci-dessous est un "crop" d'une partie de l'amas des Pléiades à l'échelle originale.
Aucune retouche est appliquée (pas de réduction de bruit, pas de rehaussement
des contrastes). Seule la balance du blanc est effectué après développement
du RAW. Pour cela, pour tous les boîtiers, la couche rouge est multipliée par
1,88, la couche verte par 1,00 et la couche bleu par 1,66.
|
|
|
|
La différence de taille des pixels entre d'une part le 5D (8,20 µm) et d'autre part le 20D/350D (6,42 µm) a un effet immédiatement visible sur la résolution spatiale et sur le champ couvert. L'image 5D a un contenu moins "fouillée" que l'image délivrée par le 350D par exemple. Le fort gain d'amplification du 350D fait merveille : même si l'image est au final d'apparence plus "granuleuse", c'est tout de même celle-ci qui donne le sentiment de la meilleure détectabilité (même si les différences sont subtiles). Dans les conditions du test, sous un ciel très lumineux, le 5D est s'en doute désavantagé par la grosse taille de ces pixels. Son gain est aussi plus faible que celui du 350D. Ainsi, pour retrouver le même signal dans l'image du 5D et dans l'image du 350D, il faut régler le premier sur 650 ISO et le second sur 400 ISO. La comparaison devrait s'en doute être faite sur ces bases, mais Il n'en demeure pas moins vrai que l'on peut être déçu par la prestation du 5D dans ce test. En effet, la surface collectrice des "gros" pixel du 5D aurait du faire plus la différence sur l'image d'objets diffus. Une fois de plus, à la décharge du 5D, il faut admettre que le fond de ciel très lumineux de l'observatoire ne l'avantage pas (les gros pixels captent mieux aussi la pollution lumineuse). Certes, la supériorité en terme de S/B du 5D établie au paragraphe 9 se manifeste par un fond de ciel d'apparence moins bruitée, mais tout de même en l'état, sous réserve d'observations sous un ciel plus propice, en terme de détection, le 5D se situe au niveau du 350D et du 20D.
Le gros intérêt du 5D par rapport au 20D/350D est le champ couvert en une seule vue. C'est ce que montre la planche suivante. Le plein format de l'image des Pléiades est présenté, mais avec une réduction d'un facteur 10 par rapport aux originaux (les images ne sont pas prétraitées, ce qui explique les défauts cosmétiques, traces de poussières, l'électroluminescance plus prononcées avec le 5D, ...).
|
|
|
Le champ couvert par le 5D impressionne. La surface du capteur du 350D est de 328 mm2 alors que celle du 5D est de 864 mm2. La surface angulaire du 5D est donc plus de 2,6 fois supérieure à celle du 350D pour une même optique. Ainsi, dans l'exemple ci-dessus, en équipant les boîtiers d'un téléobjectif de 400 mm, le champ angulaire est de 3,2° x 2,1° avec le 350D et de 5,1° x 3,4° avec le 5D. C'est un argument de poids pour le 5D si le domaine d'application est un programme de surveillance du ciel, par exemple pour détecter de nouvelles étoiles variables, des novae ou encore des comètes. Les chances de découverte sont au moins deux fois plus élevée avec le 5D qu'avec le 20D/350D (on dégrade légèrement la performance, qui devrait être en principe 2,6 fois supérieure, en tablant sur une légère perte de détectabilité du fait de la moins bonne résolution spatiale du 5D). Ce peut être décisif !